After getting the motors figured out, the frame's paintjob has dried and my parts from cerakoting has come back it was time for assembly.... like the day before I had to leave for Makerfaire...
... I also have a history of building things in hotel rooms.... oh wait....

Now to back up a bit, in the design one sees a belt but what one does not see in the picture is the idler on the bottom of the belt that keeps it in tension. Which is a 3D printed shelve over a needle bearing that spins on a shaft that sticks out from the gearbox.

Now I did dumb and somehow lost one of the needle bearings oops.... lucky I caught this before driving up to SF so I was able to make a pit stop at the LA McMaster-Carr to pick up another one. (Saved on shipping at least...).
And into the whee hours hours of the night assembly happened, and wiring was started.....

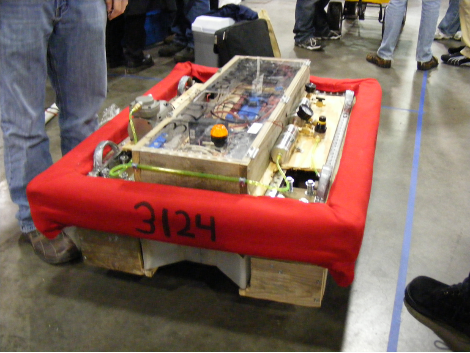
After a bit... the entire frame was mechanically assembled including steering linkages, drive modules and wheels. You can see the electronics being laid up in the photos above. The ammo can on the left houses the batteries, because PRS legalized Lithium batteries of any times I was able to use my staple aircraft LiPos!

Each can houses 3 4S 16AH very china craft LiPos, wired in series to give me 12S (48v) 16AH. These are some of the cheapest and highest energy dense batteries you can get, with a small (for lipo) 10C discharge rating. Abit that still means this pack can dump 160amps continuously at 48v....
As we all know LiPos have a nasty habit of exploding into fireballs so a few buckets of sand were obtained from the local homedepot. At this point I don't really have many photos, after some emergency runs to home depot and such for screws and misc hardware. And some panicking and guessmated sensor timing...
As we all know LiPos have a nasty habit of exploding into fireballs so a few buckets of sand were obtained from the local homedepot. At this point I don't really have many photos, after some emergency runs to home depot and such for screws and misc hardware. And some panicking and guessmated sensor timing...

IT'S DONE AND OMFG IT WORKSSSSS
... and holy shit it's fast.


Cause I am NOT a EE or CS person in anyway of the world, the electronics were simple and only took 2-3 hours of work to wire up. Basically LiPos connected into big switch, which went to the PRS fuse and then a terminal block to be able to split off into the ESCs.
Now the ESCs are what has made the history MarkKarts so deadly. Legit Kelly KBS 48v 50amp sensored brushless EV controllers with highspeed FW. These are actual legit EV designed speed controllers, unlike the brushless RC controls and "jasontrollers" used by many. And in my history they have been rock solid and burned a few 63mm sized motors to the ground. With a known history of being diffcult to drive the Melon was a worthy contender. But after wiring them up and doing some phase finding and sensor tuning with an amp clamp, they ran flawlessly throughout the weekend.
Now PRS has this pesky 1440watt power limit, physically mandated by a fuse. They controllers are rated at 50 amp contentious each, so with two of them and huge melons (ha) 48v * 50amp * 2 = 4800watts.... so that wouldn't have worked. So after some testing I ended up setting the controllers to run around 35% of there available amperage output to keep the fuse happy, this ended up being a little slower then I would have wished for but still plenty fast.
Now the ESCs are what has made the history MarkKarts so deadly. Legit Kelly KBS 48v 50amp sensored brushless EV controllers with highspeed FW. These are actual legit EV designed speed controllers, unlike the brushless RC controls and "jasontrollers" used by many. And in my history they have been rock solid and burned a few 63mm sized motors to the ground. With a known history of being diffcult to drive the Melon was a worthy contender. But after wiring them up and doing some phase finding and sensor tuning with an amp clamp, they ran flawlessly throughout the weekend.
Now PRS has this pesky 1440watt power limit, physically mandated by a fuse. They controllers are rated at 50 amp contentious each, so with two of them and huge melons (ha) 48v * 50amp * 2 = 4800watts.... so that wouldn't have worked. So after some testing I ended up setting the controllers to run around 35% of there available amperage output to keep the fuse happy, this ended up being a little slower then I would have wished for but still plenty fast.
This took up the first day of the Makerfaire which no offical races were schedule for. Over the weekend Saturday and Sunday we had to go though a time trial, two 15 minute races, and one 75 minute endurance race.
Unforantly I have basically no photos or videos of any of the races myself... was a bit to busy working on the kart and making sure it stayed working to really get any media. Here's a video after the fact doing some fun testing.
Anyways with everything running it was time for racessssssss.
And with no media content it makes this section kinda boring but suffice to say MarkKart did okay ish. Ended up placing 4th in EVERYTHING. Ended up with a result of 4th place in race points and very little moxie as I didn't have a body....
WAIT... this is "power wheels" racing series... yeah... as part of my shamefulness I wasn't able to get a body built in time so I was a "naked" racer. Which is allowed sometimes when there is a lack of cars, which has always been a problem at the SF race.
And with no media content it makes this section kinda boring but suffice to say MarkKart did okay ish. Ended up placing 4th in EVERYTHING. Ended up with a result of 4th place in race points and very little moxie as I didn't have a body....
WAIT... this is "power wheels" racing series... yeah... as part of my shamefulness I wasn't able to get a body built in time so I was a "naked" racer. Which is allowed sometimes when there is a lack of cars, which has always been a problem at the SF race.
The biggest flaw was always me, and for once not my engineering but my driving. Which to be honest I didn't really care about placement in the races so I didn't push as hard as I could have all the time. In addition the razer ground force seat was hellish uncomfortable and I kept sliding out of it which left my in pain after awhile cause I was holding myself in.
But another Makerfaire wrapped up. Lots of fun had, and lessons learned for next time.
But another Makerfaire wrapped up. Lots of fun had, and lessons learned for next time.